Zugwagons Doppelpendel
DGL-Systeme und gekoppeltes Zugwagon-Modell
Dieser Abschnitt behandelt lineare DGL-Systeme in strukturierter Form.
Schwerpunkt: lineare DGL-Systeme, Eigenwertmethode und Anwendung auf gekoppelte Massen-Feder-Systeme.
Lineare DGL-Systeme erster Ordnung
Wir betrachten ein homogenes lineares System:
In Matrixform schreiben wir:
Warum dieser Schritt wichtig ist: Sobald das System als geschrieben ist, reduziert sich die DGL-Frage auf lineare Algebra (Eigenwerte und Eigenvektoren von ).
Wir setzen
Dann folgt
also ein Eigenwertproblem.
Solution
Nichttriviale Lösungen gibt es genau dann, wenn die charakteristische Gleichung
erfüllt ist.
Zusatzbemerkung:
- Ist ein Eigenwert und ein zugehöriger Eigenvektor, dann ist
eine Lösung.
- Bei zwei linear unabhängigen Eigenvektoren ist die allgemeine Lösung die Summe der beiden Moden.
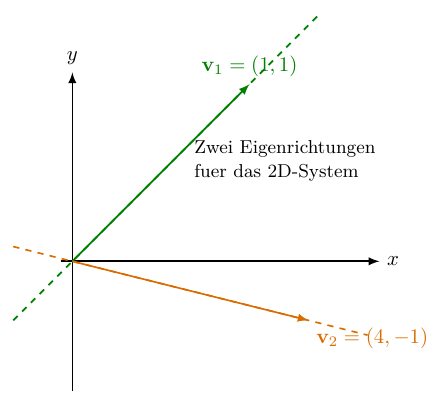
Beispiel mit zwei Eigenwerten
Wir betrachten das System
Charakteristisches Polynom:
Damit ergeben sich:
Zugehörige Eigenvektoren:
Allgemeine Lösung:
Interpretation der Vorzeichen:
- erzeugt einen wachsenden Anteil .
- erzeugt einen abklingenden Anteil .
Löse das System
Solution
Zuerst berechnen wir das charakteristische Polynom:
Daraus folgen die Eigenwerte und .
Ein mögliches Eigenvektorpaar ist
Damit erhalten wir:
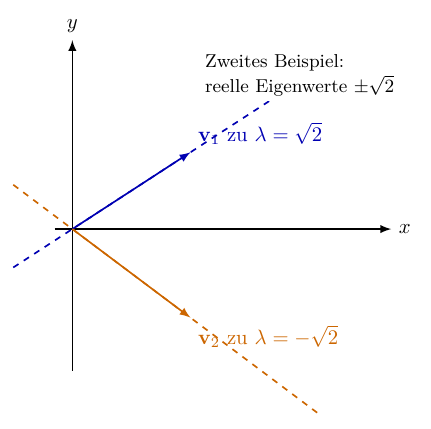
Zweites Beispiel mit -Eigenwerten
Als zweites Beispiel betrachten wir
Es ergibt sich
Die Lösung hat daher die Struktur
wobei aus den linearen Gleichungen zu den Eigenwerten stammen.
Für
gilt
Also gilt .
Gekoppeltes Zugwagon-Modell (3 Massen, 2 Federn)
Wir betrachten drei gleiche Massen mit Federkonstante und Auslenkungen .
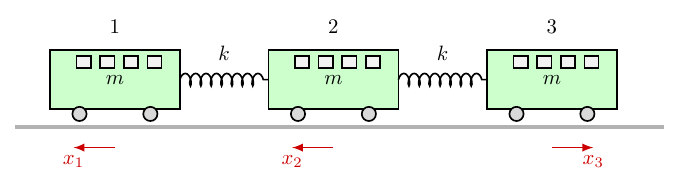
Die Newton-Gleichungen lauten:
In Matrixform:
Physikalische Lesart:
- Erste Masse: nur über die erste Feder an Masse 2 gekoppelt.
- Mittlere Masse: erhält Kräfte von beiden Federn.
- Dritte Masse: nur über die zweite Feder an Masse 2 gekoppelt.
Mit
und dem harmonischen Ansatz
erhält man wieder ein Eigenwertproblem für die Kopplungsmatrix.
Einsetzen liefert explizit:
und damit
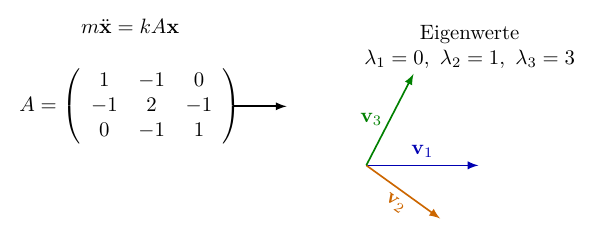
Die Form entspricht also wieder
mit .
Eigenwerte und Eigenmoden der 3x3-Matrix
Wir berechnen die Eigenwerte über die charakteristische Gleichung:
Mit
folgt durch Laplace-Entwicklung nach der ersten Zeile:
Daraus ergeben sich die Nullstellen:
Daraus folgen die Eigenfrequenzen:
Zugehörige Eigenvektoren:
Wir lösen für jeden Eigenwert das lineare Gleichungssystem
Für :
Das ergibt
Aus der ersten und dritten Gleichung folgt , also
Für :
und damit
Also gilt und , daher
Für :
und somit
Aus der ersten und dritten Gleichung folgt und , also .
Damit erhalten wir:
Interpretation:
- : starre Translation (Nullmode, keine Federdehnung)
- : Schwingungsmoden mit unterschiedlichen Frequenzen
Für bewegen sich alle Massen gleich weit. Damit bleiben beide Federlängen konstant, es wirkt keine Rückstellkraft und somit tritt keine Schwingung auf: .
Allgemeine Lösung und Modenzerlegung
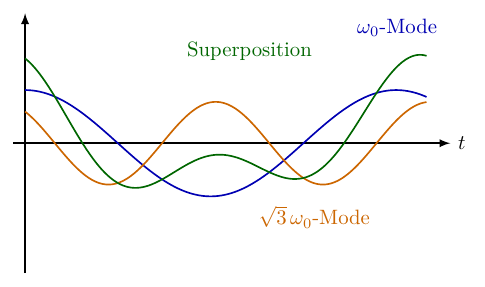
Die Gesamtlösung ist die Linearkombination aller Moden:
Reell geschrieben (für Messdaten oder Simulationen):
wobei die Koeffizientenvektoren durch die Anfangswerte und bestimmt werden.
Die komplexen Exponentialansätze liefern kompakte Formeln; physikalisch wird der Realteil betrachtet. Die Moden zeigen, welche Bewegungsformen das gekoppelte System bevorzugt.
 Open in GeoGebra
Open in GeoGebra