Ursprungsaffinitäten & Matrizen
Wird der Ursprung bei einer affinen Abbildung auf sich abgebildet - ist er also Fixpunkt von - so wird von einer Ursprungsaffinität gesprochen.
Die Koordinatendarstellung hat dann die Gestalt
Zur Erinnerung sei noch erwähnt, dass es sich bei den Spaltenvektoren und einer affinen Abbildung um die Bilder der Basisvektoren und handelt.
Grundlegende Ursprungsaffinitäten
Die folgenden vier Ursprungsaffinitäten bilden zusammen mit der Translation die Bausteine aus der jede affine Abbildung zusammengesetzt werden kann.
-
Die Streckung am Ursprung mit dem Faktor ist eine Ursprungsaffinität:
-
Die Achsenspiegelung an der - bzw. -Achse ist eine Ursprungsaffinität:
-
Die Scherung an der - bzw. -Achse ist eine Ursprungsaffinität:
-
Die Rotation um einen Winkel mit dem Zentrum im Ursprung ist einen Ursprungsaffinität:
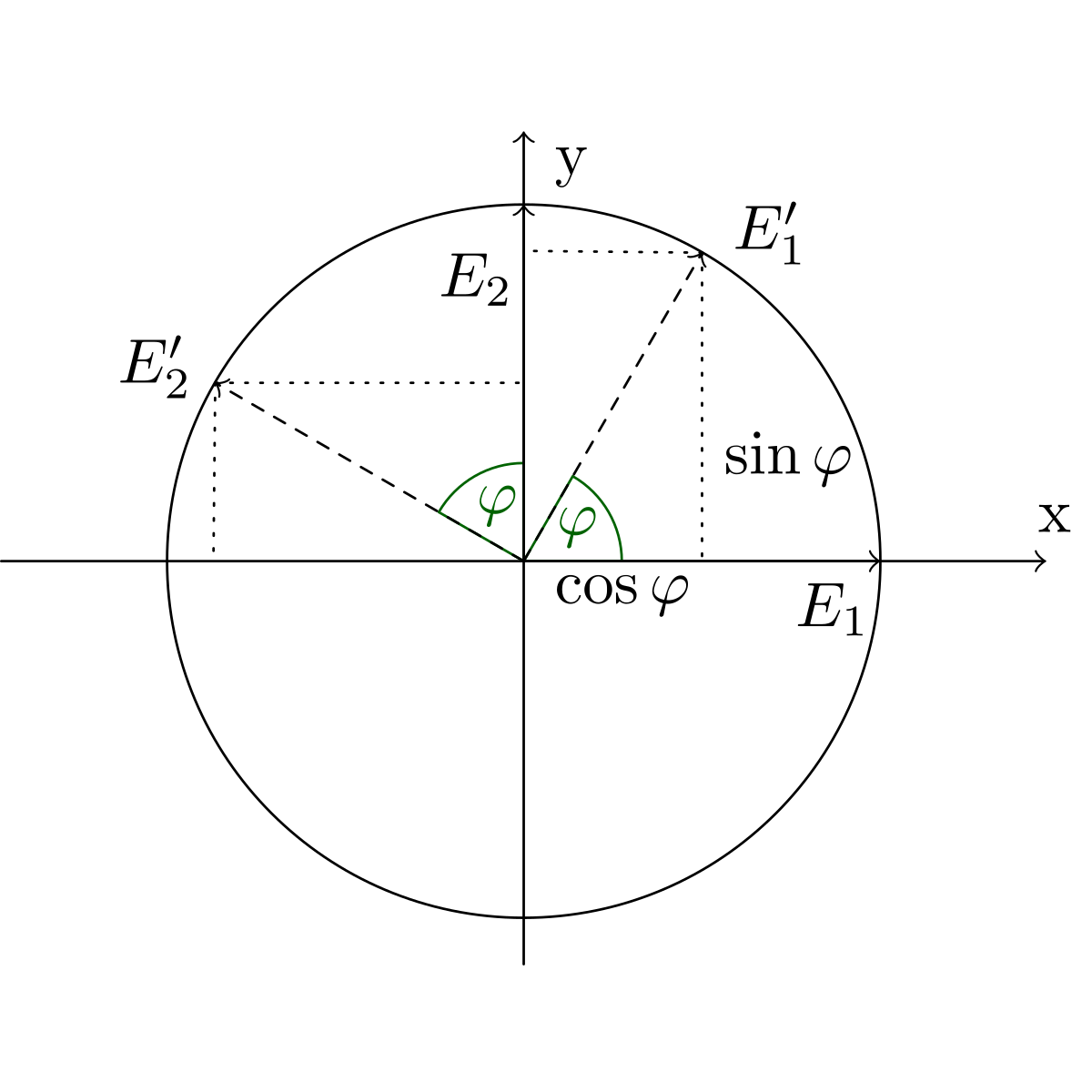
Eine Spiegelung an einer Ursprungsgeraden
kann als Verknüpfung folgender Ursprungsaffinitäten ausgedrückt werden: Drehung um den Winkel (in Uhrzeigerrichtung), Spiegelung an der -Achse und Drehung zurück um den Winkel (in Gegenuhrzeigerrichtung).
Solution
Wie lautet die Abbildungsgleichung der Spiegelung an der Geraden
Wie die Abbildungsgleichung der Spiegelung an der Geraden
Solution
Gegeben sei die Ursprungsaffinität
Zeige, dass es sich dabei um eine Rotation handelt und bestimme den Drehwinkel.
Solution
Sei . Betrachte . Es ist .
Gegeben sei die Ursprungsaffinität
Zeige, dass es sich dabei um eine Spiegelung an einer Ursprungsgeraden handelt und bestimme ihre Funktionsgleichung.
Solution
, also und die Spiegelachse hat die Funktionsgleichung .
Die Matrixdarstellung einer Ursprungsaffinität
Die Gleichung einer Ursprungsaffinität
sind bestimmt durch das Schema der vier Koeffizienten:
Ein solches Schema wird als Matrix bezeichnet; genauer als -Matrix, weil im Schema Zeilen und Spalten auftreten.
Ein rechteckiges Schema mit Zeilen und Spalten wird -Matrix genannt.
Nach Definition unterscheidet sich eine -Matrix nicht von der Koordinatenschreibweise eines Vektors.
Grundoperationen von Matrizen
Es ist üblich, Matrizen mit einem lateinischen Grossbuchstaben zu benennen. Die Matrix-Komponenten werden durch den entsprechenden lateinischen Kleinbuchstaben - versehen mit Doppelindizes (Zeilen- und Spaltennummer) - beschrieben:
Addition
Die Addition zweier Matrizen erfolgt komponentenweise:
Multiplikation mit einem Skalar
Die Multiplikation mit einem Skalar erfolgt ebenfalls komponentenweise:
Eigenschaften der Operationen
Die -Matrizen bilden bezüglich der Addition eine kommutative Gruppe.
Gruppe
Erinnere dich an die Definition von Gruppe und Kommutativität und begründe obige Aussage.
Solution
Das Neutrale ist A-A\mathbb{R}$ vererbt.
Zu den oben genannten Gruppenaxiomen gilt mit der definierten skalaren Multiplikation zudem das Distributivgesetz:
und .
Multiplikation
Die Multiplikation zweier Matrizen wirkt auf den ersten Blick etwas willkürlich:
Ist sie aber nicht. Geometrisch läuft die Matrizenmultiplikation auf eine Verknüpfung zweier Ursprungsaffinitäten (genauer: zweier linearer Abbildungen mit Fixpunkt im Ursprung) hinaus, wie man nachrechnen kann.
Auch das Berechnen des Matrizenprodukts ist nicht kompliziert, wenn das Prinzip erkannt wurde: Das Element, das in der -ten Zeile und -ten Spalte der Produktmatrix steht, ergibt sich, indem der -te Zeilenvektor von mit dem -ten Spaltenvektor von skalar multipliziert wird.
Sei ein Vektor der Ebene, so ist
der Bildvektor der Abbildung, die durch die Matrix repräsentiert ist.
Das Bild eines Vektors kann also als Multiplikation zweier Matrizen (einer -Matrix und eines Vektors ) angesehen werden. Damit ergibt sich auch der folgende
Repräsentieren die Matrizen und zwei Abbildungen und , so stellt die Matrizenmultiplikation die zusammengesetzte Abbildung dar:
Proof
Das rechnet man einfach in beiden Varianten durch und erhält Gleichheit.
Eigenschaften zur Matrizenmultiplikation
- Die Menge der -Matrizen ist abgeschlossen bezüglich der Multiplikation; das heisst, dass falls und -Matrizen sind, so ist auch ihre Produkt eine solche.
- Gegeben seien die drei Matrizen
Zeige anhand dieser Matrizen, dass die Matrizenmultiplikation
- assoziativ ist,
- nicht kommutativ ist.
- Gib die Matrix an, die bezüglich der Multiplikation "neutral" ist, d.h. diejenige Matrix , für die gilt:
für alle Matrizen . wird Einheitsmatrix genannt.
- Eine Matrix heisst Inverse von , wenn
ist.
Solution
Man rechnet nach.
Finde mit Hilfe von Gleichungssystemen die Inversen der folgenden Matrizen
Solution
Die dritte Matrix ist nicht invertierbar, da sie singulär ist.
Bildet die Menge der -Matrizen bezüglich der Multiplikation eine Gruppe?
Determinante, reguläre und singuläre Matrizen
Eine Ursprungsaffinität kann durch eine Matrix
mit geeigneten Komponenten dargestellt werden. Umgekehrt stellt sich die Frage, ob jede Matrix
auch eine Ursprungsaffinität repräsentiert. Da die Abbildung , wiedergegeben durch eine Matrix , linear in ihren Argumenten ist,
ist die Abbildung geraden-, parallelen- und verhältnistreu. Zudem ist der Ursprung ein Fixpunkt. Für eine Ursprungsaffinität fehlt also einzig und allein noch das Kriterium der Bijektivität.
Nehmen wir an, eine Abbildung , repräsentiert durch die Matrix , sei nicht bijektiv; d.h. also, dass zwei verschiedene Vektoren dasselbe Bild haben: . Was lässt sich jetzt über die Matrix aussagen? (Tipp: Vereinfache das entstehende Gleichungssystem ).
Solution
Die Determinante einer -Matrix ist definiert durch
Berechne die Determinanten der folgenden Matrizen. Was stellst du fest?
Solution
, ,
Eine Matrix heisst regulär, falls ihre Determinante ; sonst wird sie singulär genannt.
Die Menge der regulären -Matrizen bildet bezüglich der Multiplikation eine Gruppe. Sie entspricht gerade der Menge aller Ursprungsaffinitäten.
Proof
Übung. Finde das neutrale Element und inverse Elemente. Assoziativität kann man ebenfalls nachprüfen.
Zeige:
Solution
Man rechnet allgemein beide Seiten aus und sieht, dass sie identisch sind.
Berechne die Determinanten der Matrizen, die zu folgenden Abbildungen gehören:
-
Identität,
-
Streckung am Ursprung mit dem Faktor ,
-
Spiegelung an den Koordinatenachsen,
-
Spiegelung am Ursprung,
-
Scherung an der - bzw. -Achse,
-
Drehung um den Ursprung,
-
Spiegelung an einer Ursprungsgeraden.
Solution
a) , b) , c) , d) , der Rest ist , ausser die letzte, .
Zeige, dass der Betrag der Determinante gerade dem Flächeninhalt des von den Bildern von und aufgespannten Parallelogramms entspricht. (Tipp: Umschreibe dem Paralellogramm ein Rechteckt und subtrahiere die überschüssigen Dreiecke.)
Solution
Man bestimmt die Fläche des Parallelogramms und erhält .
Die Abbildung
ist gegeben.
a) Für welches ist die zu gehörende Matrix regulär?
b) Bestimme das Bild der Ebene, wenn singulär ist.
c) Begründe: Wenn eine durch eine Matrix gegebene Abbildung zwei verschiedene Punkte auf den gleichen Punkt abbildet, dann bildet sie mindestens einen vom Ursprung verschiedenen Punkt auf den Ursprung ab. (Tipp: Betrachte die Differenz der Ortsvektoren der beiden Punkte.)
Solution
a) $\lambda\in\mathbb{R}\setminus{\tfrac{8}{3}},
b) $A=\begin{pmatrix}3 & 4\ 2 & \tfrac{8}{3}\end{pmatrix}
c) .
Von zwei Abbildungen und sei regulär und singulär. Ist singulär oder regulär?
Solution
Wegen der Multiplikativität der Determinante ist sie singulär.
Für die Berechnung der Inversen einer Matrix existiert die Formel
a) Beweise dies, indem du von der Eigenschaft Gebrauch machst.
b) Berechne die Inverse zu
\item Zeige, dass
Solution
a) einfache Rechnung
b) $A^{-1}=\frac{1}{12}\begin{pmatrix}3 & -1\6 & 2\end{pmatrix}
c) woraus die Behauptung folgt.
Fläche und Orientierung
Nicht nur der Betrag der Determinante einer Matrix hat eine geometrische Bedeutung (Flächeninhalt des durch die Affinität erzeugten Bildes des durch die Basisvektoren und aufgespannten Einheitsquadrates), sondern auch ihr Vorzeichen. Um das zu verstehen, machen wir einen kleinen Ausflug ins Dreidimensionale und die Vektorgeometrie.
Das Vektorprodukt zweier Vektoren
ergibt einen Vektor definiert durch
Das Vektorprodukt besitzt folgende Eigenschaften:
- Das Vektorprodukt steht senkrecht auf den Vektoren und .
- Die Länge des Vektorproduktes entspricht gerade dem Flächeninhalt des durch und aufgespannten Parallelogramms.
- Die Vektoren bilden in dieser Reihenfolge ein Rechtssystem.
Der zweidimensionalen Raum kann durch Ergänzen einer -Komponente zum dreidimensionalen Raum aufgepeppt werden. In diesem Sinn wird der - als Einbettung in den - auch für das an und für sich nur im dreidimensionalen Raum definierte Vektorprodukt zugänglich; die -Komponente wird einfach gesetzt. Damit ergibt sich z.B. für die Spaltenvektoren der Abbildungsmatrix
- nota bene die Bilder der Einheitsvektoren und unter der Abbildung .
Aus den Eigenschaften des Vektorprodukts folgt jetzt: Ist die Determinante der Matrix positiv, so müssen die Vektoren und dieselbe "Orientierung" aufweisen, wie die Basisvektoren und . Korrekter:
Das Quadrat, aufgespannt durch die Basisvektoren und hat genau dann dieselbe Orientierung (gleichsinnig) wie das durch die Vektoren aufgespannte und Parallelogramm, wenn die Determinante von positiv ist. Ist die Determinante negativ, so bewirkt die durch repräsentierte Abbildung einen Orientierungswechsel (gegensinnig).
Damit nicht genug; es gilt der folgende
Ist die Matrix, die zu einer Ursprungsaffinität gehört, so besteht zwischen den Flächeninhalten und eines Vielecks und dessen Bildes die Beziehung
Proof
Sei ein Dreieck mit den Punkten . Der Flächeninhalt von ist gegeben durch:
Nach Anwendung der linearen Abbildung wird das Bilddreieck durch die Punkte beschrieben. Der neue Flächeninhalt ist dann:
Verwende nun die Eigenschaft der Determinante:
Dann folgt:
Damit ist gezeigt, dass bei einer linearen Abbildung der Flächeninhalt des Bildes eines Dreiecks (und damit auch jedes Vielecks durch Zerlegung) mit dem Betrag der Determinante der Abbildungsmatrix skaliert wird.
Die zur zentrischen Streckung am Ursprung gehörende Matrix.
mit dem Streckungsfaktor besitzt die Determinante . D.h. also, dass durch die zentrische Streckung mit dem Faktor die Flächen mit multipliziert werden. Die Orientierung bleibt dabei erhalten, auch wenn negativ ist.
a) Gegeben sei das Parallelogramm mit und . Ermittle die Fläche dieses Parallelogramms (mit und ohne Zeichnung). sei die Abbildung mit
Ermittle den Flächeninhalt und die Orientierung des Bildparallelogramms, zunächst ohne seine Ecken zu berechnen.
b) Berechne nun und .
c) Bestimme die Determinante der Spiegelung an irgendeiner Ursprungsgeraden.
Solution
, also , . Man hat und . , , , . Die Determinante müsste sein, da der Umlaufssinn ändert aber der Flächeninhalt nicht.