Operationen auf Vektoren
Wir wollen uns zuerst mit der geometrischen Interpretation der Grundoperationen auseinandersetzen. Die algebraische Umsetzung ist dann einfach durch Angabe von Definitionen zu erledigen, die die Geometrie repräsentieren.
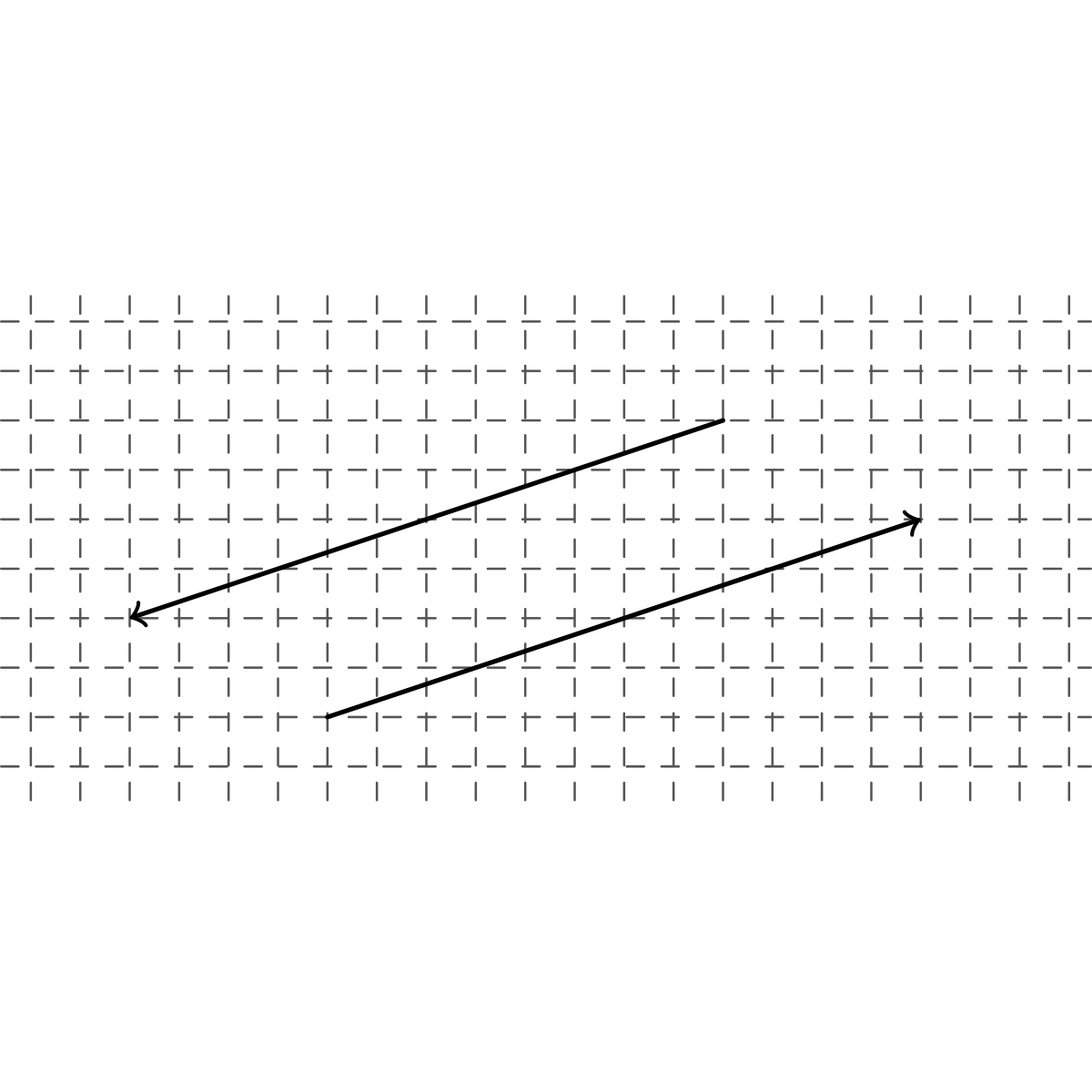
Der Vektor, der zwar den gleichen Betrag, aber die entgegengesetzte Richtung wie hat, wird mit bezeichnet und heisst Gegenvektor von .
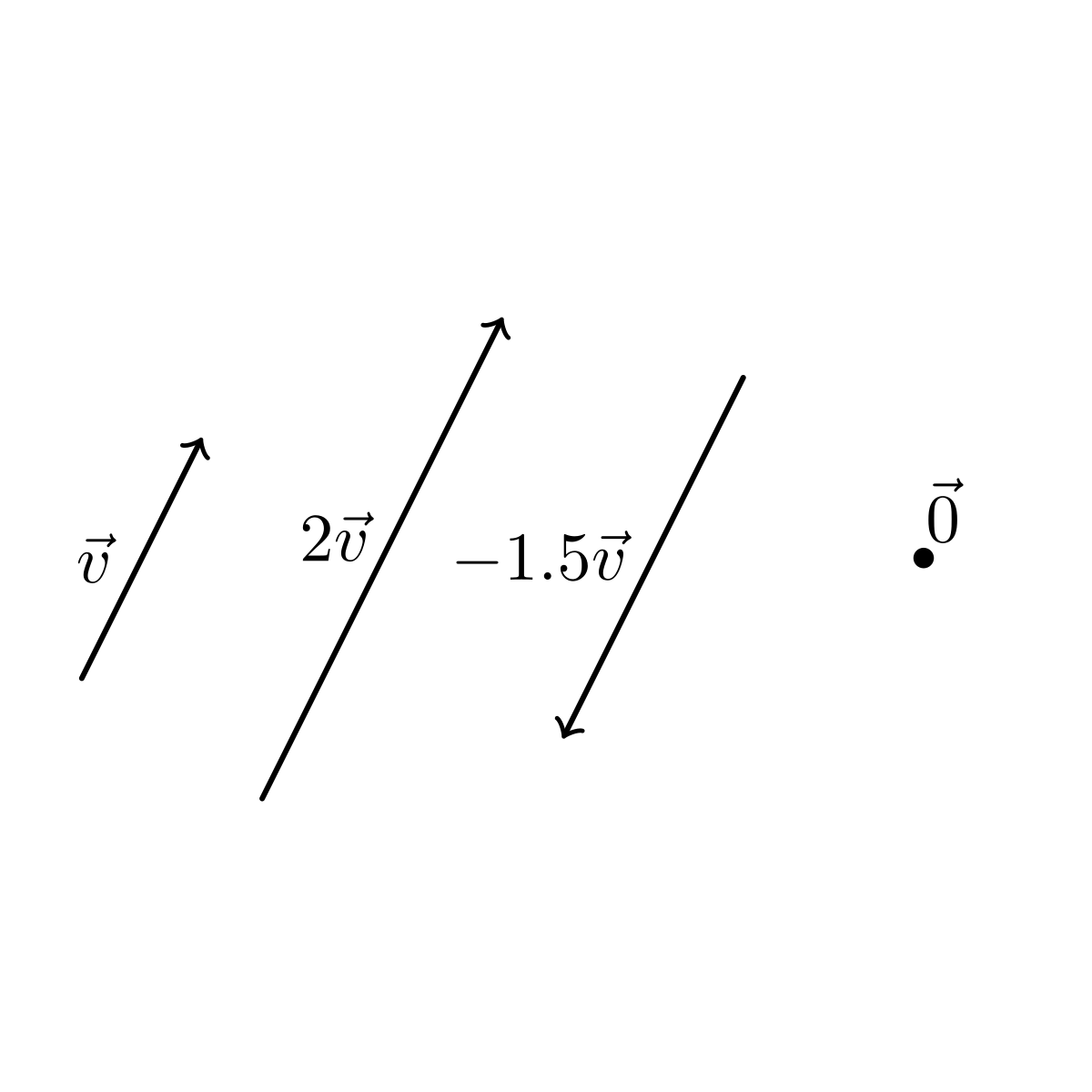
Analog definiert man die Multiplikation eines Vektors mit einem Skalar.
Für ist ein Vektor mit dem -fachen Betrag von :
Diese Operation nennt man kurz S-Multiplikation.
- Falls ist, hat dieselbe Richtung wie ,
- Falls ist, hat die entgegengesetzte Richtung von ,
- Falls ist, ist der Nullvektor.
Umgekehrt gilt
Sind zwei Vektoren und zu ein und derselben Geraden parallel, so ist ein Vielfaches von , d.h.
Zwei Vektoren und , für die $$ \vec{w}=t\vec{v}
Ein Vektor mit Betrag heisst Einheitsvektor.
Insbesondere bezeichnen wir die Einheitsvektoren in - bzw. -Richtung mit bzw. .
Addition und Subtraktion
Man legt fest
Die Summe zweier Vektoren und ist der Vektor , den man durch Aneinandersetzen von und erhält. (Vektorsummen kommentiert)
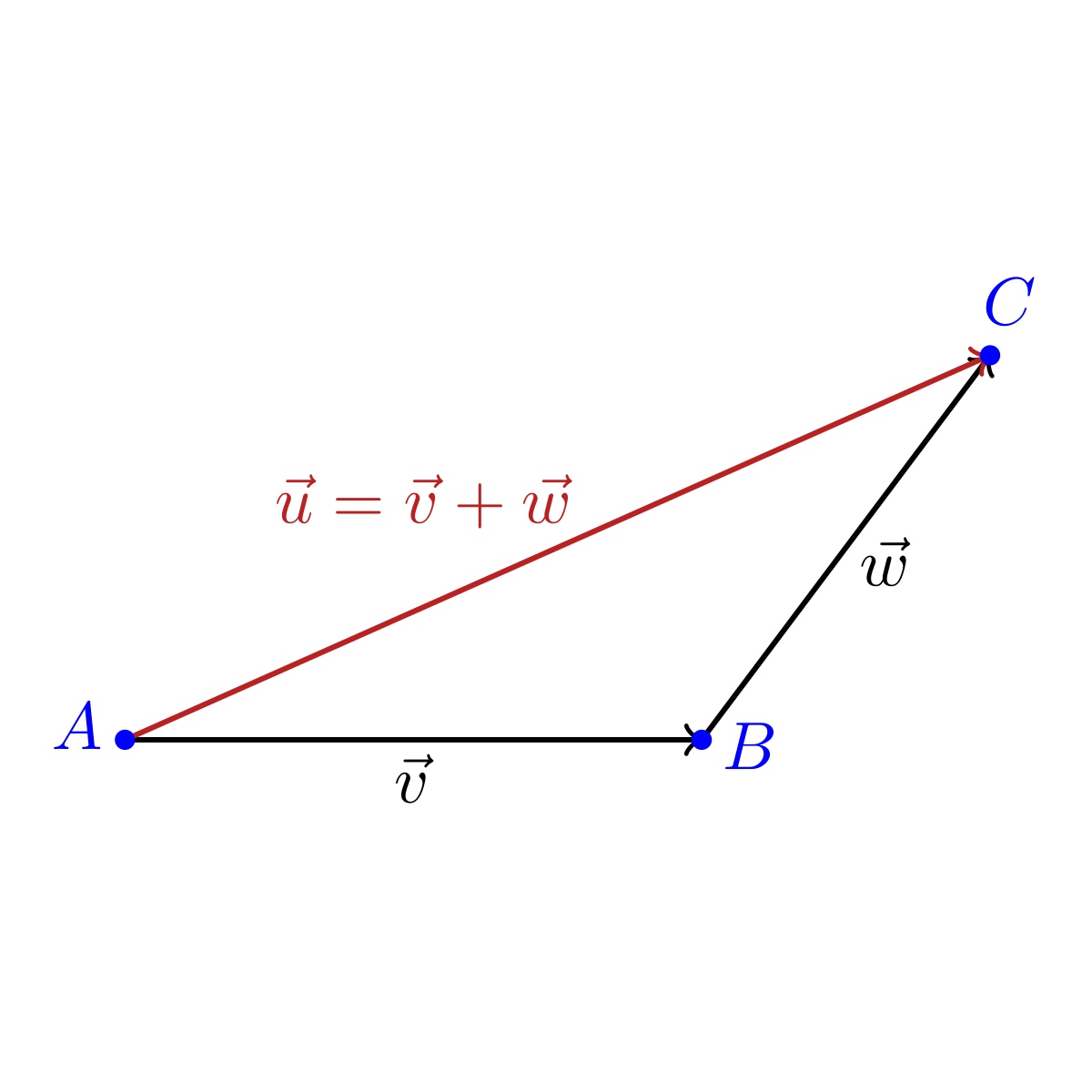
Der Summenvektor hat seinen Anfangspunkt im Anfangspunkt des ersten Summanden und seinen Endpunkt im Endpunkt des zweiten Summanden:
entspricht der Diagonalen des von und aufgespannten Parallelogramms.
Die Subtraktion wird auf die Addition zurückgeführt:
Man subtrahiert den Vektor vom Vektor , indem man zu den Gegenvektor von addiert. Aus ergibt sich sofort . Um die Differenz zu erhalten, genügt es, die Vektoren und an einem Punkt anzutragen und den Vektor aufzusuchen, der vom Endpunkt des Vektors zum Endpunkt des Vektors reicht.
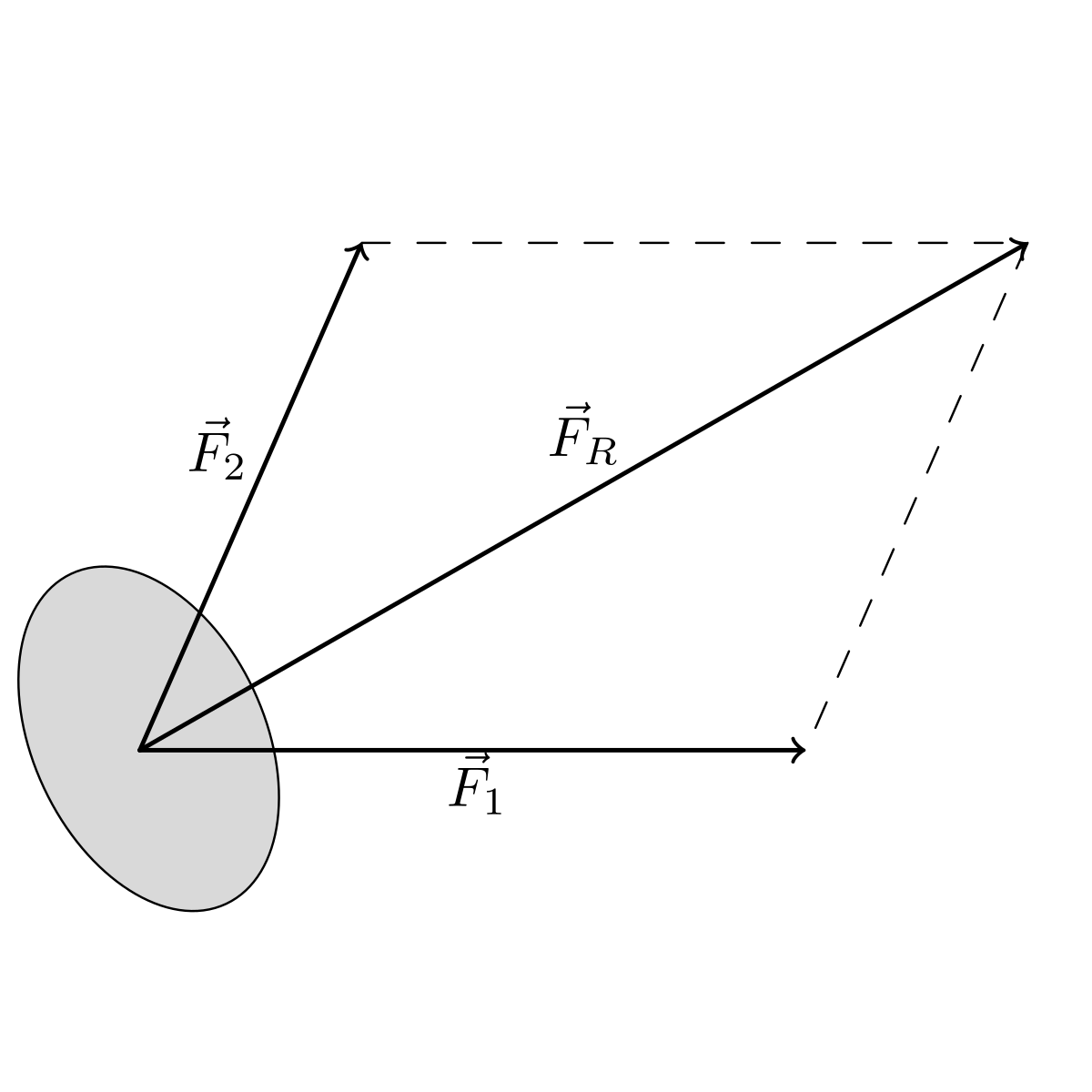
Mit dieser Definition erzielt man auch eine Übereinstimmung mit dem in der Physik experimentell nachgewiesenen "Kräfteparallelogramm". Wenn an einem Körper die Kräfte und am gleichen Punkt angreifen, dann können sie durch die resultierende Kraft ersetzt werden, welche die vektorielle Summe der angreifenden Kräfte ist:
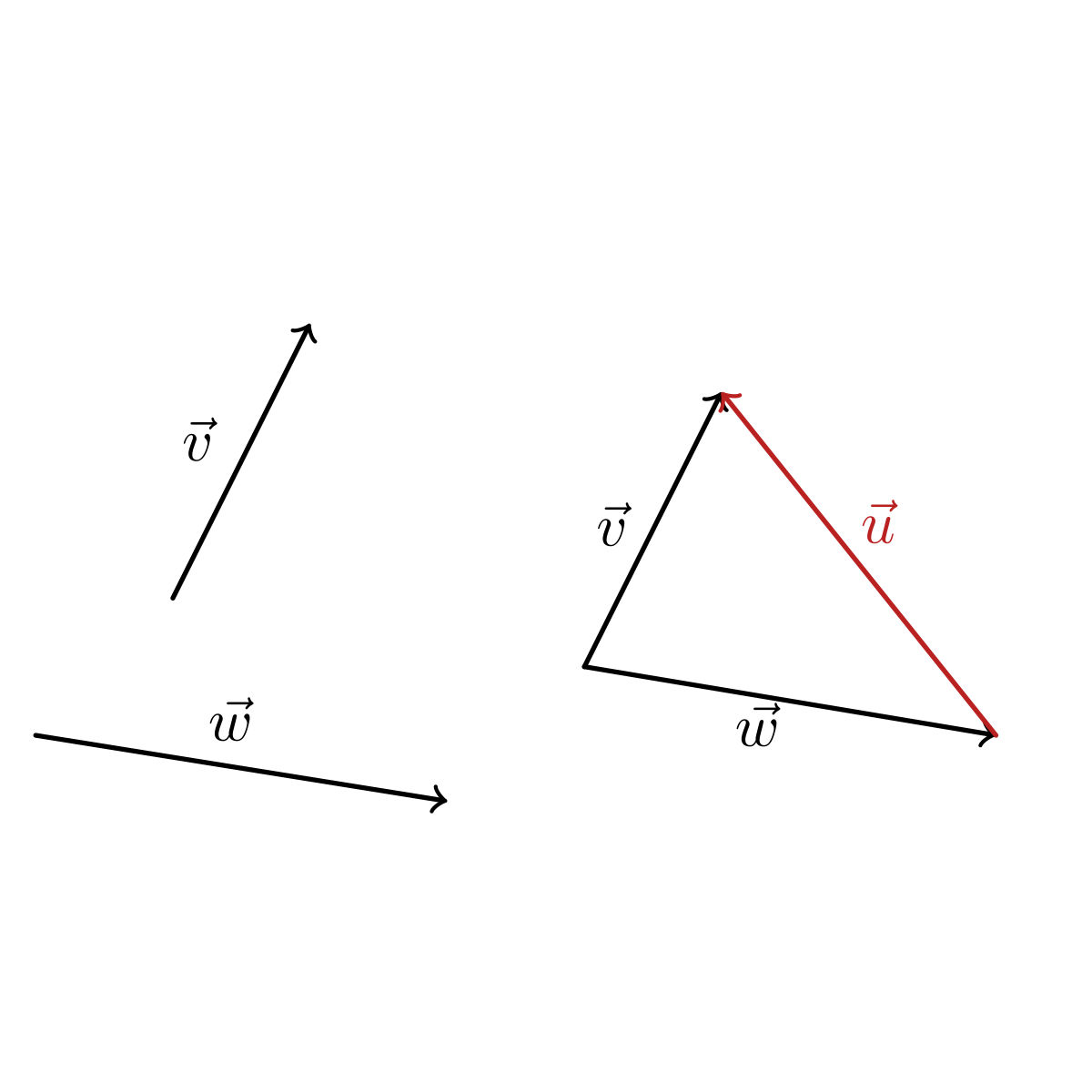
Gegeben seien die Vektoren und .
\begin{center} \includegraphics{tikz_9.png} \end{center} Skizziere:
a)
b)
Solution
\includegraphics{tikz_10.png} \includegraphics{tikz_11.png}
Ein Schwimmer () will einen breiten Fluss ()
a) auf kürzestem Wege,
b) auf schnellstem Wege
überqueren. Berechne jeweils die Dauer und zusätzlich den Vorhaltewinkel und die Abdrift.
Solution
a) Wir wollen rechtwinklig zum Ufer schwimmen. Also müssen wir etwas vorhalten, so dass das Dreieck , und , der resultierende Vektor rechwinklig ist. Also gilt
und damit hat man für Meter etwas mehr als Sekunden. Der Vorhaltewinkel beträgt .
Zeige, dass die Mittellinie eines Dreiecks halb so lang wie die Grundlinie und parallel zu dieser ist.
Solution
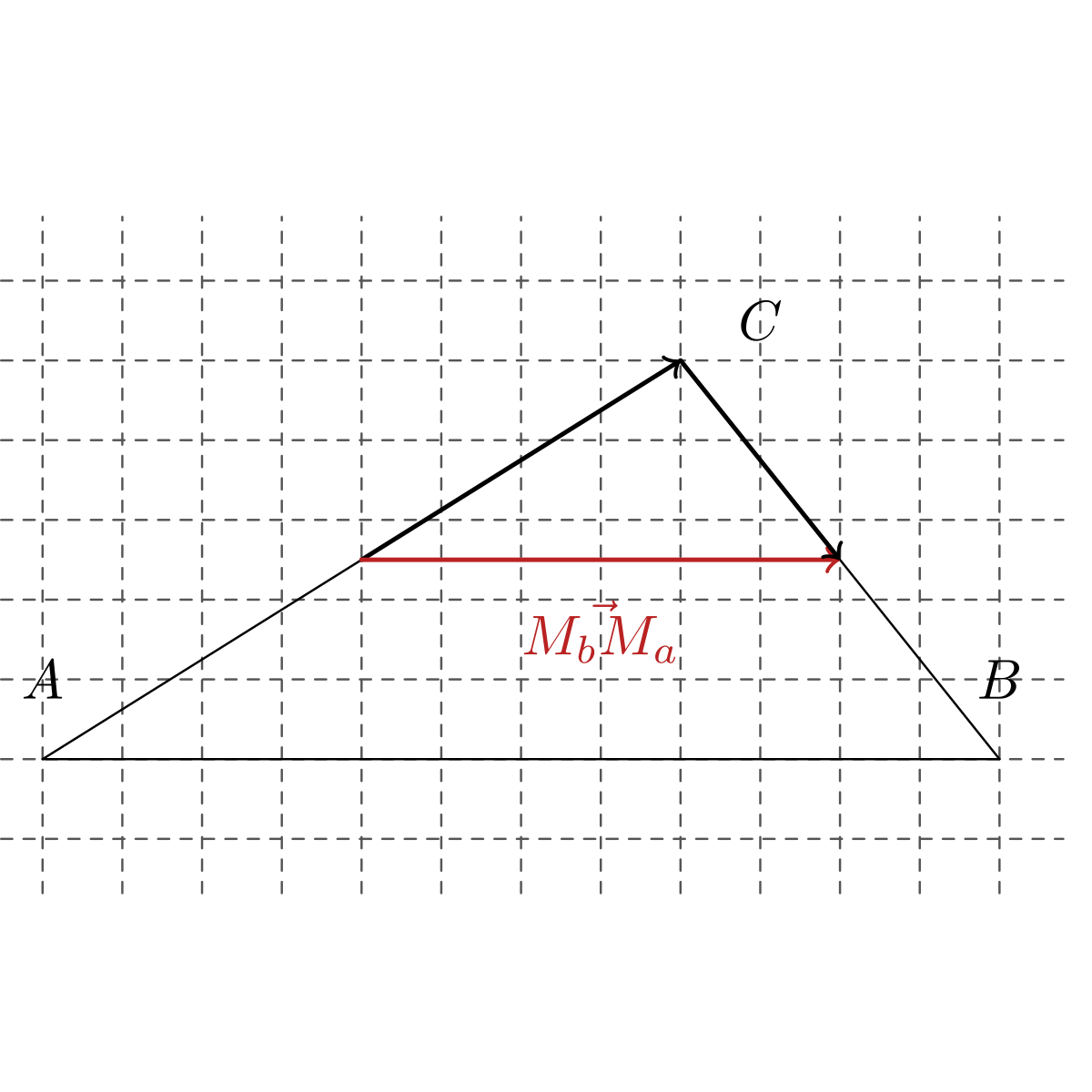
Der Skizze nach ist
Also ist die Mittellinie halb so lang wie die Grundlinie und parallel dazu.
Halbieren sich in einem Viereck die Diagonalen, so ist es ein Parallelogramm?!
Und, hat man ein Parallelogramm, so halbieren sich die Diagonalen.
Solution
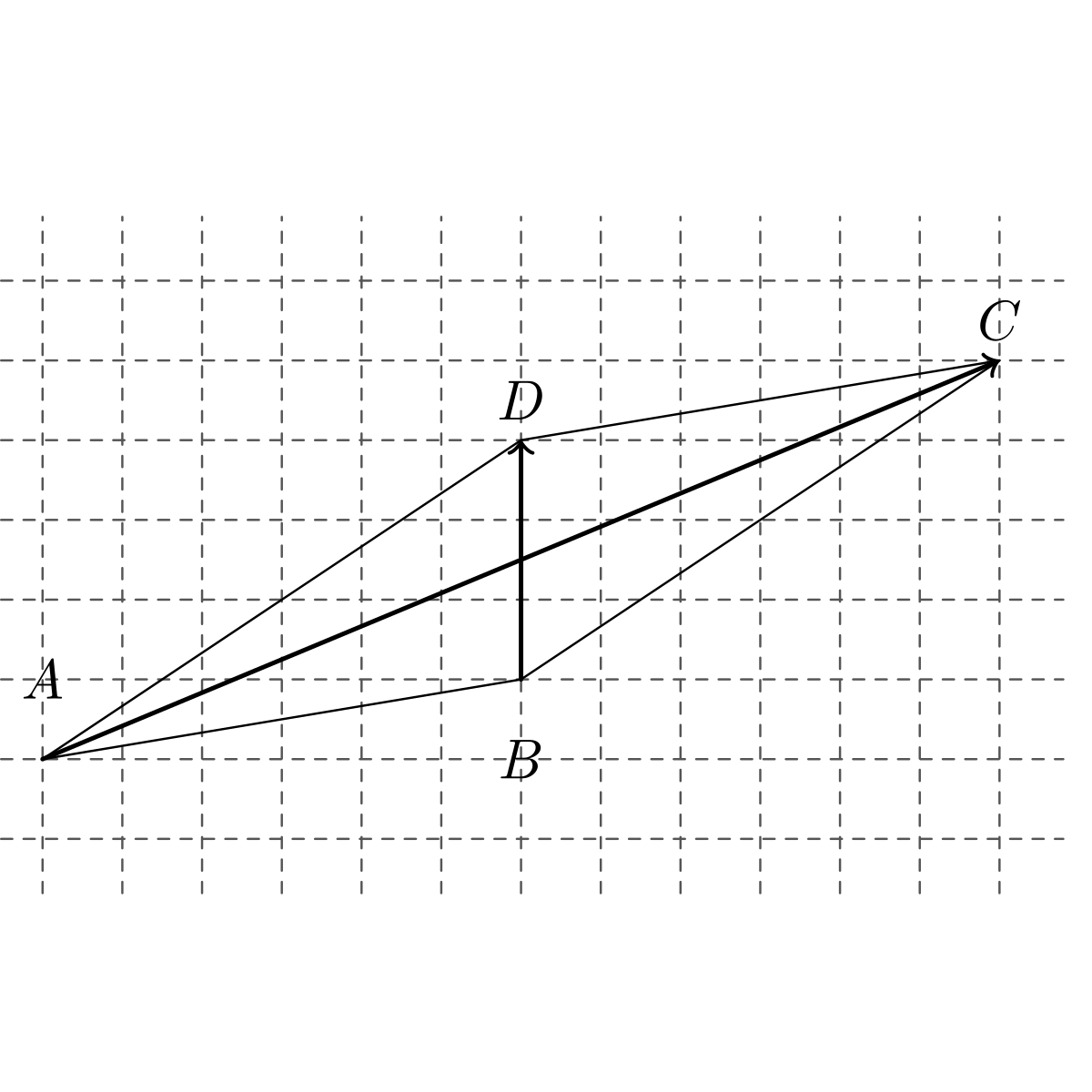
Es muss und somit auch . Wegen folgt
und daraus, da , die Gleichungen und . Das heisst . Somit halbieren sich die Diagonalen.
Man sieht sofort, dass, falls sich die Diagonalen halbieren, das Viereck ein Parallelogramm ist. Man notiere dazu einfach zwei parallele Seiten und drücke sie über die halbierten Diagonalen aus. Also haben wir sogar Äquivalenz. (Diagonalen im Parallelogramm halbiert kommentiert)
Ein ausserordentlich nützlicher Satz lässt sich über nicht kollineare Vektoren formulieren:
Sind und nicht kollinear und
dann muss \emph{und} sein.
Proof
Es seien und nicht kollinear abhängig und . OEdA , dann gälte . Dies ist ein Widerspruch zur Annahme, dass und nicht kollinear sind. Analog geht man für vor.
Die lineare Unabhängigkeit zweier Vektoren und lässt sich geometrisch veranschaulichen, wenn man die Diagonale des von und aufgespannten Parallelogramms betrachtet. Diese Diagonale entspricht nur dann dem Nullvektor, wenn und zugleich wird.
Man nennt zwei nicht kollineare Vektoren linear unabhängig.
Vektoren im Koordinatensystem
Wir wollen in diesem Kapitel ein rechtwinkliges Koordinatensystem zugrunde legen.
Durch Parallelverschiebung kann man Repräsentanten von Vektoren so verschieben, dass ihre Anfangspunkte auf den Ursprung eines rechtwinkligen Koordinatensystems zu liegen kommen. Diese an den Ursprung gebundenen Repräsentanten nennt man Ortsvektoren.
Die zweidimensionalen Einheitsvektoren und in Richtung der -Achse bzw. -Achse werden Basisvektoren genannt. Sie erlauben es als Basis einen beliebigen Ortsvektor der -Ebene als Linearkombination der Basisvektoren zu schreiben.
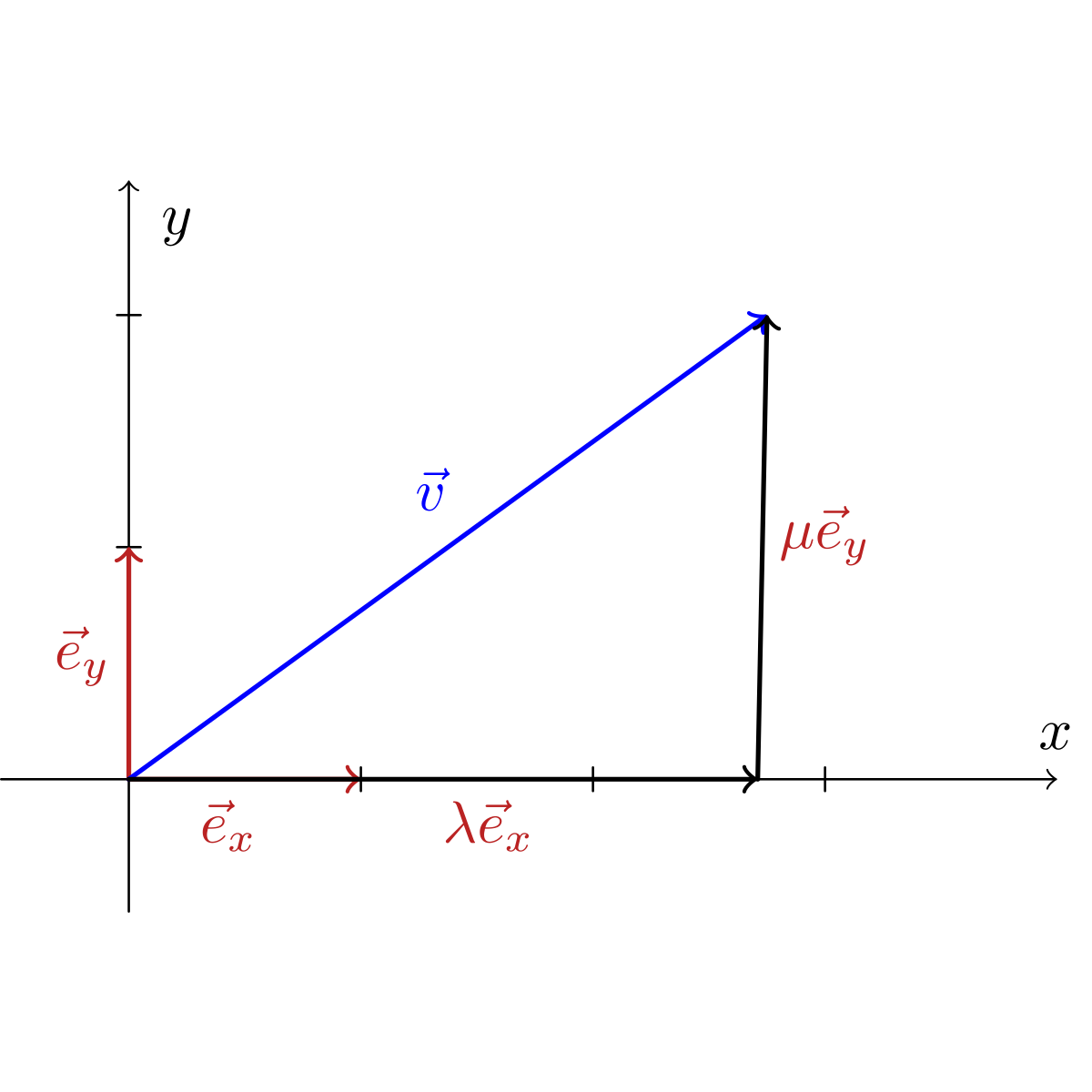
Die Vektoren und der Zerlegung von nennt man die vektoriellen Komponenten von bezüglich der Basis . Die Koeffizienten und in der Zerlegung des Vektors
nennt man die skalaren Komponenten oder die \definition{Koordinaten} des Vektors bezüglich der Basis .
Will man Punktkoordinaten und Vektorkoordinaten voneinander unterscheiden, so kann man Punktkoordinaten nebeneinander, zum Beispiel , und Vektorkoordinaten untereinander schreiben. Exemplarisch
Wir identifizieren einen Punkt einfach mit dem entsprechenden Ortsvektor. Aus dem Kontext geht jeweils klar hervor, ob man mit Punkten oder Vektoren arbeitet.
Statt schreiben wir kompakter:
Für die Länge von gilt
Proof
Der Satz folgt direkt aus dem Satz von Pythagoras und .