Schwingungen
Freie Schwingung
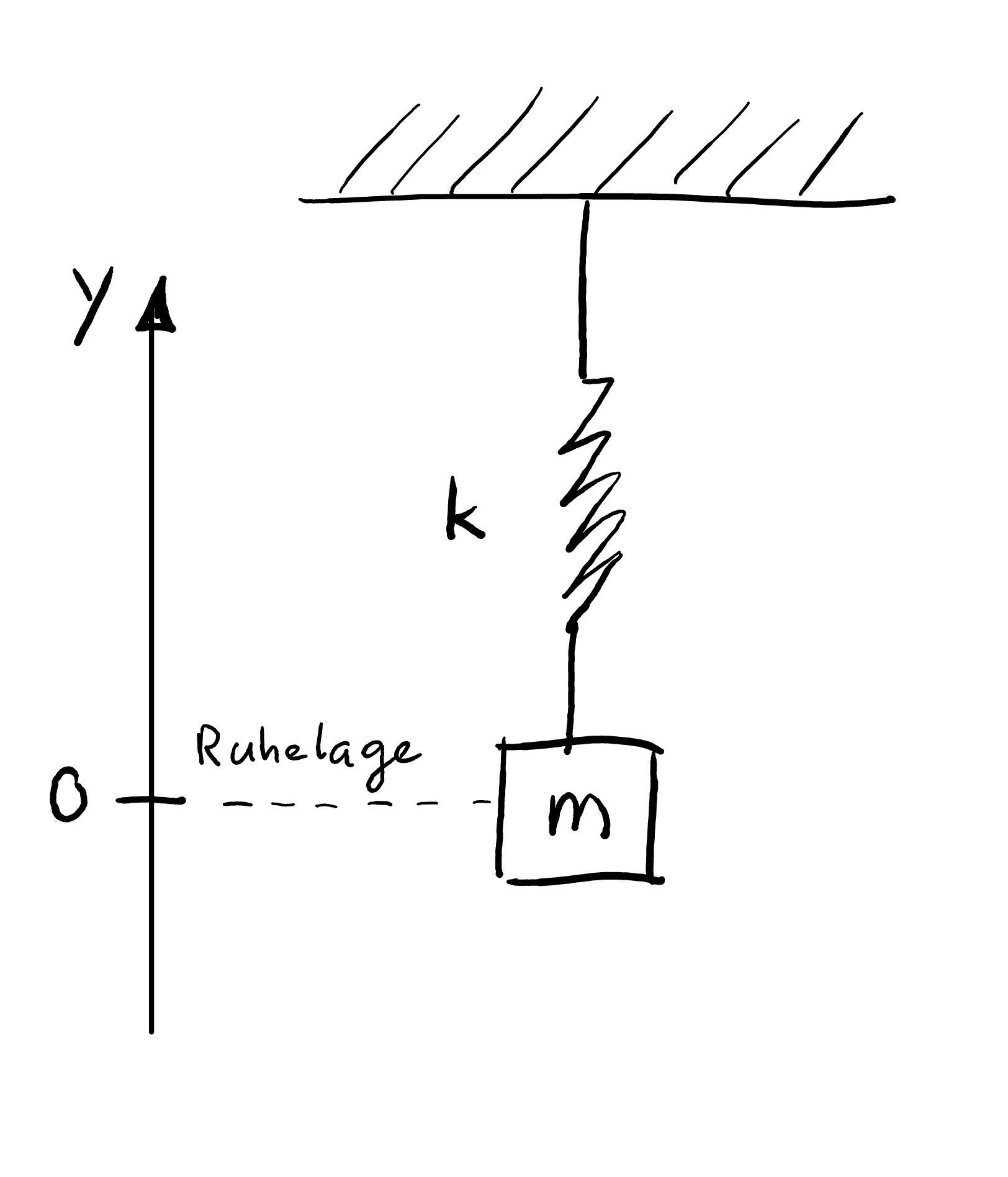
Die rücktreibende Federkraft einer "idealen" Feder mit Federkonstante und angehängter Masse ist proportional zur Auslenkung aus der Ruhelage; eine solche ideale Feder nennen wir - nach dem Physiker Robert Hooke (1635 - 1703) - Hook'sche Feder.
Die Bewegungsgleichung lautet also nach dem Newtonschen Aktionsprinzip
was wir mit in der Form
schreiben. Als Lösungsansatz wählen wir
Eingesetzt ergibt dies und damit
Wir erhalten also die beiden linear unabhängigen Lösungen
Die allgemeine Lösung der Differentialgleichung ist dann die Linearkombination dieser linear unabhängigen Lösungen und :
Intermezzo. Die lineare Unabhängigkeit sieht man zum Beispiel so ein: Betrachte
zusammen mit seiner Ableitung
Diese beiden Gleichungen müssen für alle Zeiten gelten, insbesondere auch für . Daraus ergibt sich unmittelbar ; also sind und linear unabhängig.
Nun muss als Auslenkung aus der Ruhelage eine reellwertige Funktion sein. Da genau dann reellwertig ist, wenn , sind die komplexen Amplituden , komplex konjugiert - . In der Tat:
Da wegen der linearen Unabhängigkeit von und die Koeffizienten sein müssen, folgt .
Zurück zur Lösung: Wir setzen also und und erhalten mit der Euler'schen Identität - - die allgemeine Lösung
Aus der Trigonometrie der Winkelfunktionen nimmt man sich beispielsweise das Additionstheorem
setzt als und als ; schliesslich
mit und .
(Freie Schwingung kommentiert)
Ein Körper der Masse ist an einer Feder mit Federkonstante befestigt. Die Bewegung beginnt aus der Ruhelage mit einer Anfangsgeschwindigkeit .
a) Formuliere die Bewegungsgleichung und bestimme die Lösung .
b) Bestimme die Schwingungsdauer und die Amplitude.
Solution
a) Die Bewegungsgleichung lautet:
Die allgemeine Lösung ist:
Aus folgt ; aus folgt .
b) Die Amplitude beträgt , die Schwingungsdauer ist:
Die Energie setzt sich aus der potentiellen Spannenergie der Feder und der Geschwindigkeit des Massepunktes zusammen; die Spannenergie ist:
Zeige, dass die Gesamtenergie - Federenergie plus kinetische Energie - zeitlich konstant; benutze zum Beispiel die Ortsfunktion .
Solution
Das ist die totale Energie, wenn die Feder bei Auslenkung mit Geschwindigkeit startet.
Gedämpfte Schwingung
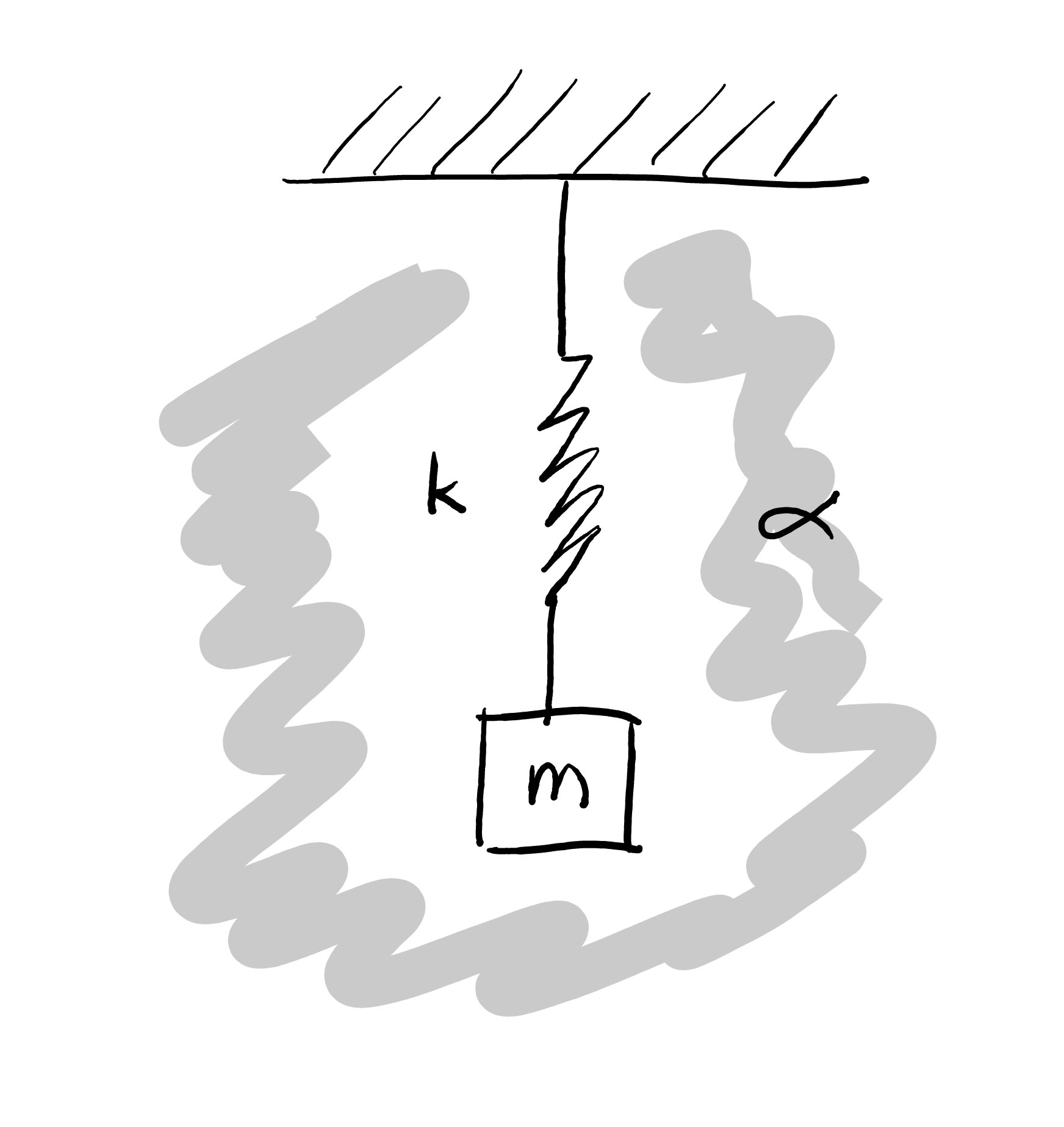
Wie im vorangegangenen Kapitel betrachten wir eine Federschwingung; jetzt aber gedämpft durch eine Kraft, die wir proportional zur Geschwindigkeit des Massenpunktes annehmen - Stokessche Reibung (George Gabriel Stokes, 1819 - 1903). Dies beobachtet man zum Beispiel bei einer laminaren Strömung eines Mediums um einen schwingenden Körper.
Die Bewegungsgleichung lautet jetzt
Umschreiben:
mit der Eigenfrequenz aus der freien Schwingung.
Lösungsansatz:
Eingesetzt in die DGL ergibt sich die charakteristische Gleichung
mit den Lösungen:
Wir setzen ; damit wird diese Lösung handlicher:
Wegen der Diskriminante in den zwei Variablen und unterscheiden wir:
- Fall 1: Ist , so haben wir starke Dämpfung; der sogenannte Kriechfall. und sind somit reell und voneinander verschieden. Die Lösung in diesem Fall ist die Linearkombination
Die Masse kriecht in die Ruhelage zurück.
- Fall 2: Mit erreicht man starke Dämpfung, der sogenannte aperiodische Grenzfall.
Als Lösung erhalten wir damit
Der Bewegungsablauf ist für und illustriert:
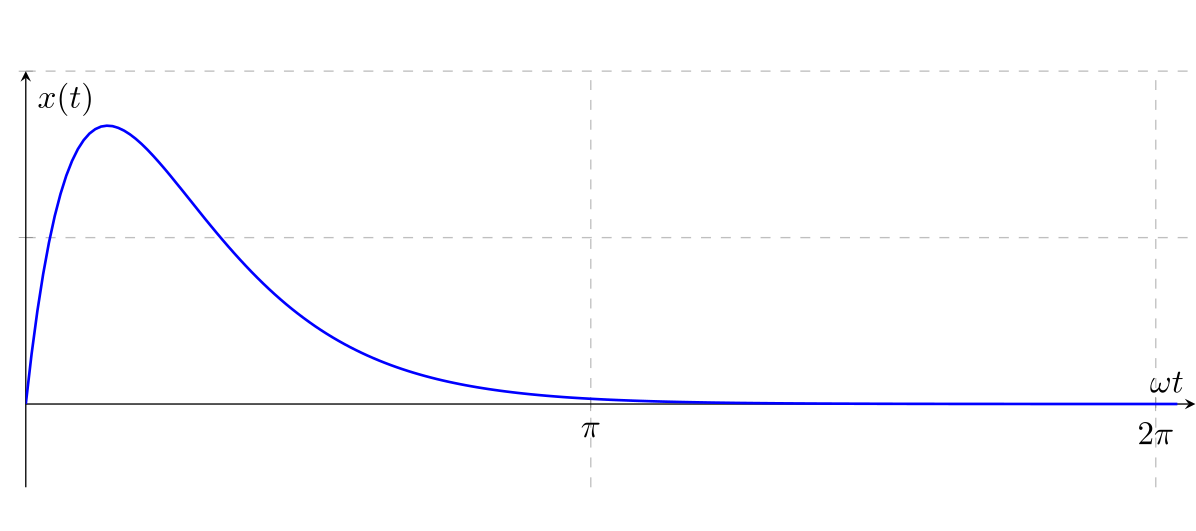
Nach möglichem Ausschlag strebt die Masse rasch gegen die Ruhelage.
Obige Lösung ist so motiviert: Wir haben in diesem aperiodischen Grenzfall eine doppelte Nullstelle der charakteristischen Gleichung; daher sind die -Funktionen des Ansatzes linear abhängig. Man kann jedoch zeigen, dass eine DGL ter Ordnung zwei linear unabhängige Basis-Lösungen hat - Stichwort Satz von Piccard-Lindelöf. Finden tut man diese mit Variation der Konstanten, also unter dem Ansatz
der eingesetzt in die Differentialgleichung auf führt. Die Lösung enthält also die Funktion und damit folgt obige Form.
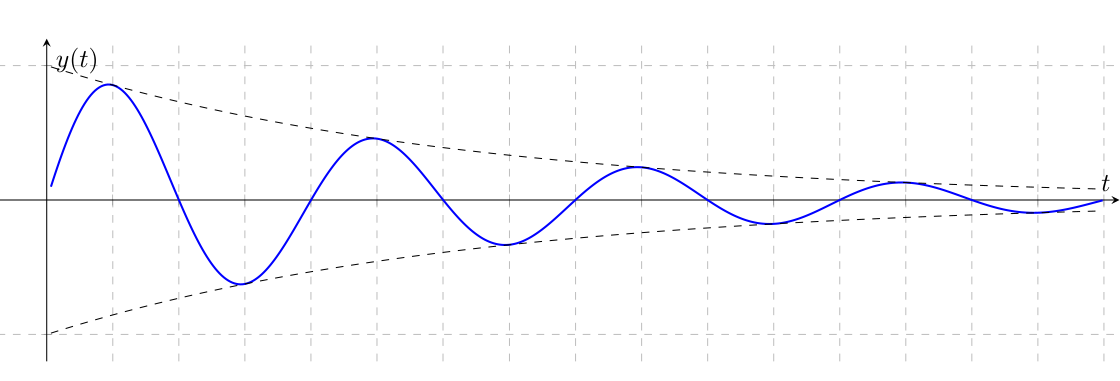
- Fall 3: Schwache Dämpfung - einen sogenannten Schwingfall - erhält man für .
Dabei sind und konjugiert komplexe Wurzeln, mit . Die Lösung ist
oder, ähnlich der Behandlung freier Schwingungen mittels Additionstheorem:
wobei und aus den Anfangsbedingungen bestimmt werden.
zeigt, dass im Falle der gedämpften Schwingung die Kreisfrequenz kleiner als die Kreisfrequenz der freien Schwingung ist - wie erwartet.
(Gedämpfte Schwingung kommentiert)
Ein Körper der Masse ist an einer Feder mit Federkonstante aufgehängt. Die Reibung ist proportional zur Geschwindigkeit mit Dämpfungskonstante . Der Körper wird aus der Ruhelage mit Geschwindigkeit angestossen.
a) Stelle die Bewegungsgleichung auf.
b) Teste die allgemeine Lösung:
indem du mit den Anfangsbedingungen und bestimmst und dann in die DGL einsetzt.
c) Beschreibe den zeitlichen Verlauf qualitativ.
Solution
a) Mit dem Newtonschen Grundgesetz () und den Kräften (Feder) sowie (Dämpfung) gilt:
Einsetzen der Werte ():
b) Wir bestimmen zunächst die Parameter der gegebenen Lösungsformel.
Mit und ergibt sich die Kreisfrequenz der gedämpften Schwingung zu .
Ansatzfunktion:
Konstanten und bestimmen:
- . Da sein muss (sonst keine Bewegung), folgt .
- .
- .
Die spezifische Lösung lautet:
Test durch Einsetzen in die DGL ():
Wir berechnen die Ableitungen (Faktor zur Übersicht ausgeklammert):
-
Einsetzen:
c) Es handelt sich um den Schwingfall: Die Amplitude nimmt exponentiell ab, während der Körper mit der Kreisfrequenz um die Ruhelage oszilliert.
Erzwungen gedämpfte Schwingung
Wir betrachten eine gedämpfte Schwingung (), die periodisch mit der Kraft angetrieben wird.
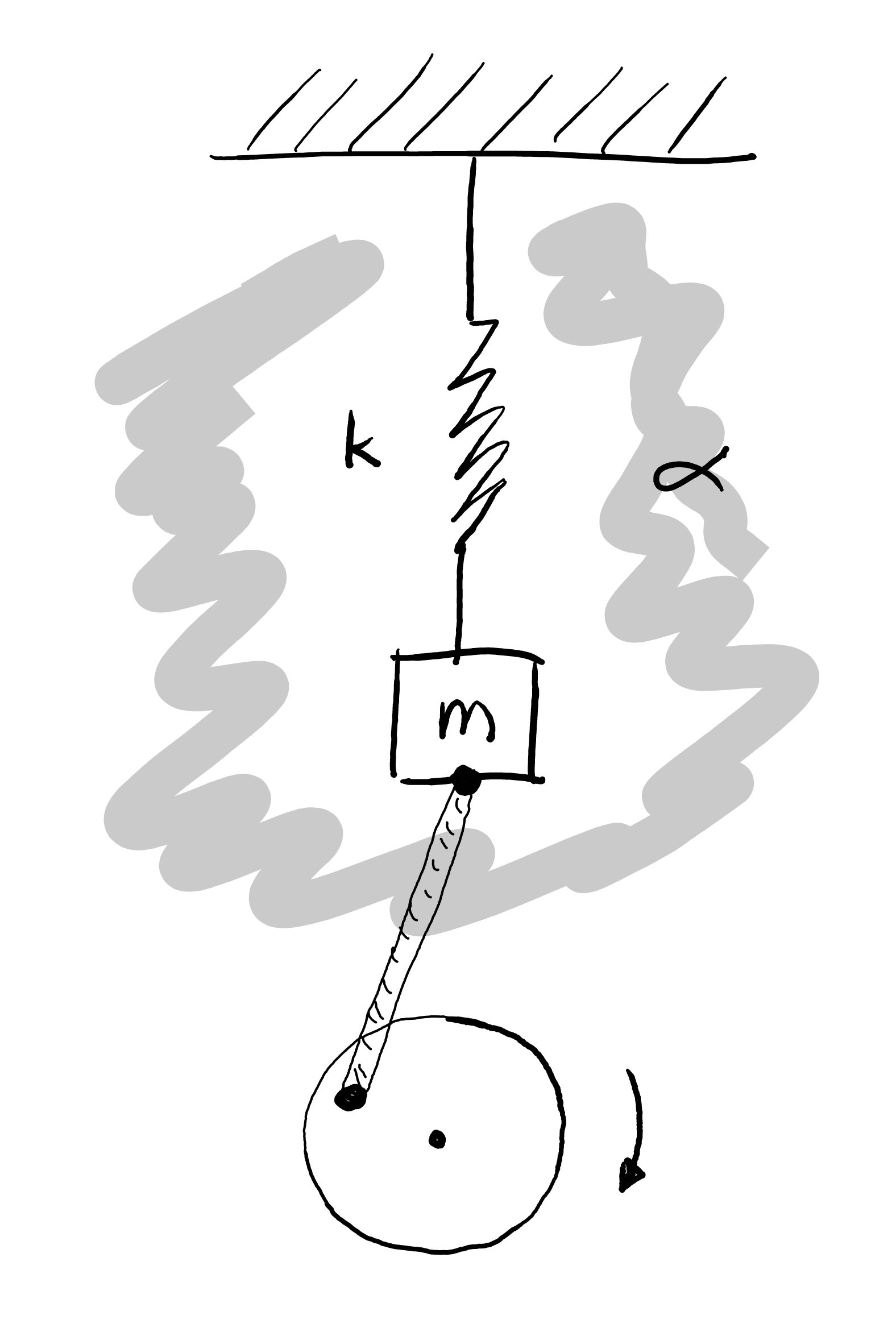
Die Schwingungsgleichung lautet mit den üblichen Bezeichnungen und der Anregerfrequenz :
Dies ist eine inhomogene lineare Differentialgleichung zweiter Ordnung: Deshalb lösen wir zuerst die zugehörige homogene Differentialgleichung, suchen dann eine pratikuläre Lösung und erhalten so die allgemeine.
Die homogene Differentialgleichung wurde im Kapitel zur gedämpften Schwingung hergeleitet. Für geringe Dämpfung ergab sich - wenn wir nur den homogenen Teil benutzen -
mit .
Um die allgemeine Lösung zu gewinnen, bleibt eine partikuläre Lösung der inhomogenen Differentialgleichung zu bestimmen. Als Ausgangspunkt dafür nutzen wir eine experimentelle Beobachtung: Das System schwingt demnach immer mit der Erregerfrequenz , die Eigenfrequenz spielt mit zunehmender Zeit eine geringere Rolle,
Damit ergibt sich der komplexe Ansatz
Das heisst . Daraus folgt - im Falle und nicht beide gleichzeitig:
Daraus erhält man
Wir haben den Faktor
ausklammert - so lässt sich die für die Winkelfunktion notwendige Bedingung erfüllen -, um eine weitere Vereinfachung mittels des Additionstheorems
vorzunehmen. Es folgt
mit als partikuläre Lösung.
Wir haben damit für die Lösungsgesamtheit in den üblichen Bezeichnungen:
Die Anregerfrequenz für die maximale Amplitude erhalten wir als Minimum des Radikanden ; sie ist
Die Amplitude ist dann
(Erzwungen gedämpfte Schwingung kommentiert)
Open in GeoGebra
Ein Oszillator mit Masse , Dämpfung und Federkonstante wird durch eine äussere Kraft angeregt.
a) Stelle die Bewegungsgleichung auf.
b) Finde eine Lösung im eingeschwungenen Zustand.
c) Bestimme die Amplitude der erzwungenen Schwingung.
d) Bestimme die Resonanzfrequenz.
Solution
a) Bewegungsgleichung:
b) Partikuläre Lösung:
Einsetzen ergibt: ,
c) Die Amplitude ist .
d) . Resonanz hat man bei . Die Amplitude ist dann
Wir ergänzen unsere Analyse noch mit dem Fall ohne Dämpfung (), den wir oben ausgeschlossen haben: Für mit wird die Amplitude immer grösser - wir haben also eine "Resonanzkatastrophe". Wegen dieses Anwachsens der Amplitude versuchen wir einen partikulären Ansatz mit Wachstum:
und finden damit
Schliesslich
und für die Lösungsgesamtheit